AGXBreakableJoint¶
Sample¶
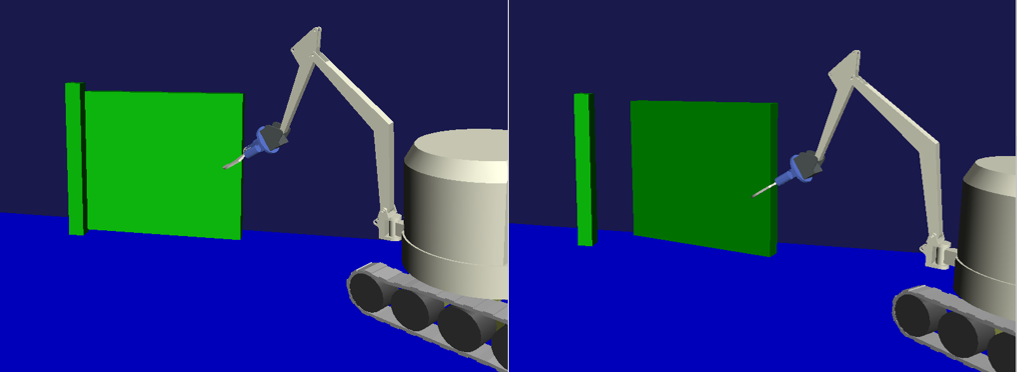
This section explains how to use samples. The sample project is below. Operate the robot DoubleArm and grasping and pulling the door. You will see that the hinge joint will be broken and the door comes off.
- project file: chorenoid/sample/AGXDynamics/agxBreakableJoint.cnoid
- body file: chorenoid/sample/AGXDynamics/agxBreakableJoint.body
Breaking condition¶
As explained at the beginning, AGXBreakableJoint triggers destruction if certain conditions are met. These conditions are two types, specified by the breakType parameter.
- Receive force more than specified force continuously during specified time (breakType: force)
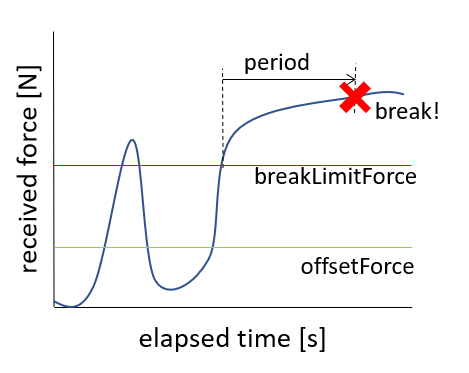
- Receive impulse more than specified threshold (breakType: impulse)
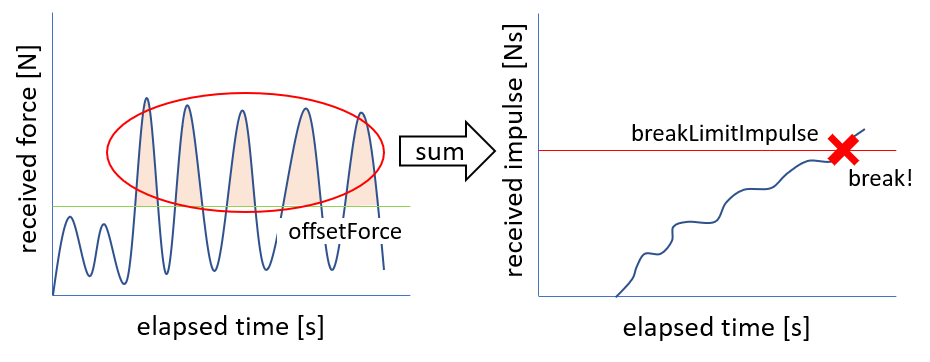
breakType is used properly depending on how to receive force. For example, in a scene ( agx_breaking_door ) that removing a hinged door, breakType: force is suitable. On the other hand, breakType: impulse is suitable for drilling scene. Because it is difficult to receive force more than the specified force continuously. The drill add the force periodically.
How to write¶
Write and use AGXBreakableJoint as follows.
links:
-
name: Door
parent: PillarL
jointType: free
elements:
-
type: AGXBreakableJointDevice
link1Name: PillarL
link2Name: Door
jointType: revolute
jointRange: [ 0, 180 ]
position: [ 0, 0, 0 ]
jointAxis: [ 0, 0, 1 ]
jointCompliance: 1e-6
breakType: force
period: 3.0 # More than 3sec,
breakLimitForce: 3000 # receive more than 3000N force continuously
validAxis: [0, 1, 0] # on Y axis direction will break the joint
- Set the link you want to connect with AGXBreakableJoint to linkName
- Set joint type to jointType
- Set joint position and axis to position and jointAxis
- Set break type to breakType
- breakType: force, required to set breakLimitForce and period additionally
- breakType: impulse, required to set breakLimitImpulse additionally
- If necessary, set compliance, spook damping to jointCompliance and jointSpookDamping
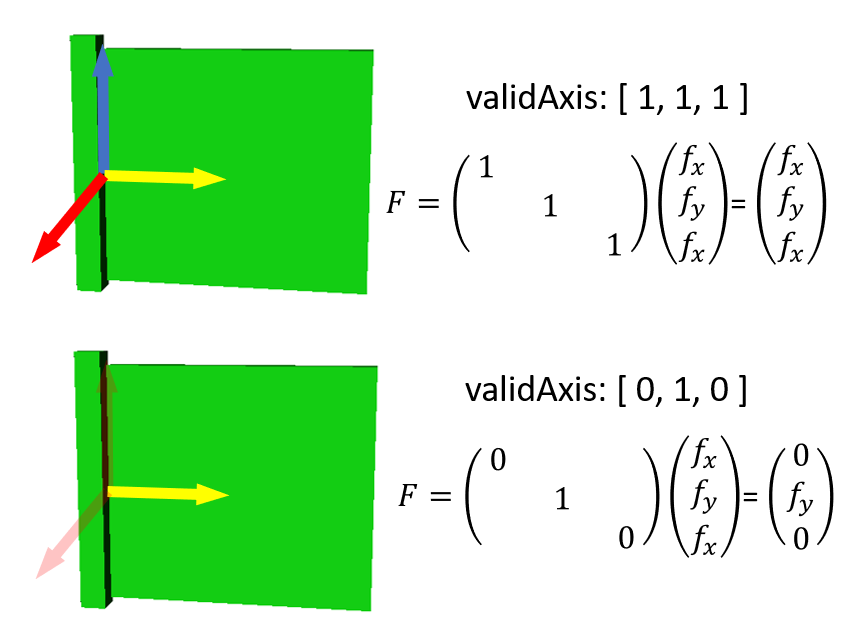
- If necessary, set validAxis . validAxis can specify which axis of the joint to use for calculating breakLimit. For example, in the figure below, by setting validAxis to [0, 1, 0], it means that the forces applied in the XZ axis direction are not considered.
Parameter descriptionExplanation of parameters¶
The parameters are described below.
| parameter | default value | unit | data type | explanation |
|---|---|---|---|---|
| type: AGXBreakableJointDevice | - | - | string | declaration of using AGXBreakableJoint |
| link1Name | - | - | string | name of the link1 |
| link2Name | - | - | string | name of the link2 |
| jointType | - | - | string | joint type: revolute, prismatic, fixed |
| position | [ 0, 0, 0] | m | Vec3 | joint position at the link1 coordinate |
| jointAxis | [ 0, 0, 1] | - | Unit Vec3 | axis of the joint at the link1 coordinate |
| jointRange | [ -inf, inf ] | m or deg | Vec2 | range of the joint motion |
| jointCompliance | 1e-8 | m/N or rad/Nm | double | compliance of the joint |
| jointSpookDamping | 0.33 | s | double | spook damping of the joint |
| breakType | force | - | string | break type: force, impulse |
| breakLimitForce | double_max | N | double | force threshold of joint broken |
| period | 0 | s | double | time threshold of joint broken |
| breakLimitImpulse | double_max | Ns | double | impulse threshold of joint broken |
| offsetForce | 0 | N | double | offset force |