SR1サンプルモデル¶
ここでは、シンプルなヒューマノイドロボットのサンプルモデルである "SR1" モデルの表している内容について説明します。
このモデルはshareディレクトリの "model/SR1" ディレクトリ以下にある以下のファイルで記述されています。
- SR1.wrl: モデルファイル本体
- SR1.yaml: 追加情報ファイル
ここではモデルファイルの本体である "SR1.wrl" の記述内容について紹介します。追加情報ファイルの内容については、次の YAMLによる追加情報の記述 を参照してください。(Choreonoidにおいては、モデルの追加情報ファイルが用意されている場合は、通常そちらを読み込むようにします。)
関節構造¶
SR1モデルは、 腰1関節(WAIST)、胴体4関節(WAIST_JOINT0〜CHEST)、 頭2関節(HEAD_JOINT0, HEAD_JOINT1)、 腕16関節(LARM_SHOULDER_P〜LARM_WRIST_R、RARM_SHOULDER_P〜RARM_WRIST_R)、 足14関節(LLEG_HIP_R〜LLEG_ANKLE_R、RLEG_HIP_R〜RLEG_ANKLE_R)で構成され、 次に示すJoint-Segment階層構造を持ちます。 Joint位置と各Jointに設定された座標系、Segment名と実際のリンクの対応については、下図を参照してください.
(Joint Jointノード名 : Segment Segmentノード名)
Humanoid SAMPLE
|
| # Root
+-humanoidBody
|
| # Upper half body
+-Joint WAIST : Segment WAIST_LINK0
| Joint WAIST_P : Segment WAIST_LINK1
| Joint WAIST_R : Segment WAIST_LINK2
| Joint CHEST : Segment WAIST_LINK3
| |
| | # Cameras
| +-VisionSensor LeftCamera
| +-VisionSensor RightCamera
| |
| | # Left arm
| +-Joint LARM_SHOULDER_P : Segment LARM_LINK1
| | Joint LARM_SHOULDER_R : Segment LARM_LINK2
| | Joint LARM_SHOULDER_Y : Segment LARM_LINK3
| | Joint LARM_ELBOW : Segment LARM_LINK4
| | Joint LARM_WRIST_Y : Segment LARM_LINK5
| | Joint LARM_WRIST_P : Segment LARM_LINK6
| | Joint LARM_WRIST_R : Segment LARM_LINK7
| |
| | # Right arm
| +-Joint RARM_SHOULDER_P : Segment RARM_LINK1
| Joint RARM_SHOULDER_R : Segment RARM_LINK2
| Joint RARM_SHOULDER_Y : Segment RARM_LINK3
| Joint RARM_ELBOW : Segment RARM_LINK4
| Joint RARM_WRIST_Y : Segment RARM_LINK5
| Joint RARM_WRIST_P : Segment RARM_LINK6
| Joint RARM_WRIST_R : Segment RARM_LINK7
|
| # Left Leg
+-Joint LLEG_HIP_R : Segment LLEG_LINK1
| Joint LLEG_HIP_P : Segment LLEG_LINK2
| Joint LLEG_HIP_Y : Segment LLEG_LINK3
| Joint LLEG_KNEE : Segment LLEG_LINK4
| Joint LLEG_ANKLE_P : Segment LLEG_LINK5
| Joint LLEG_ANKLE_R : Segment LLEG_LINK6
|
| # Right Leg
+-Joint RLEG_HIP_R : Segment RLEG_LINK1
Joint RLEG_HIP_P : Segment RLEG_LINK2
Joint RLEG_HIP_Y : Segment RLEG_LINK3
Joint RLEG_KNEE : Segment RLEG_LINK4
Joint RLEG_ANKLE_P : Segment RLEG_LINK5
Joint RLEG_ANKLE_R : Segment RLEG_LINK6
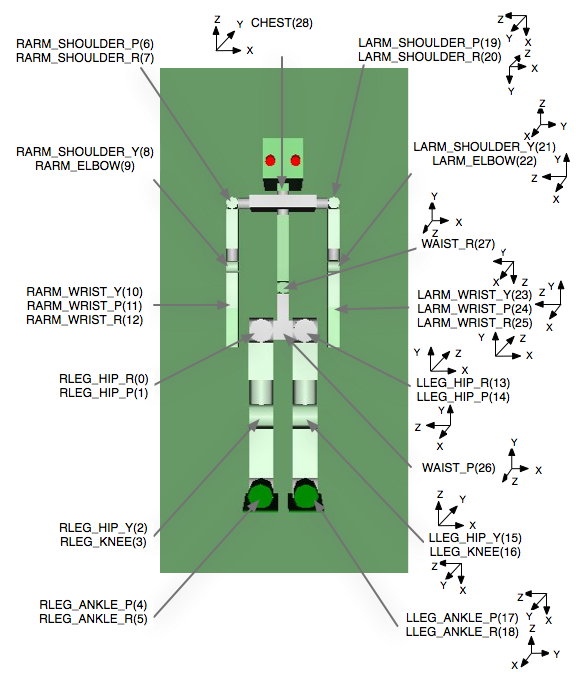
ロボットの各Jointの位置と座標系
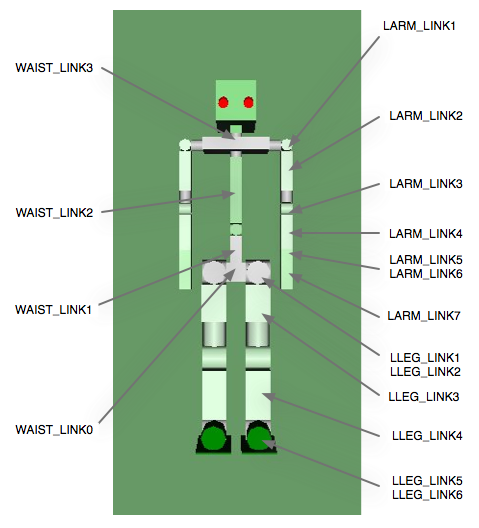
ロボットの各リンクと対応するSegment名
視覚センサ¶
上記のとおり視覚センサは、CHESTの下に2個取り付けられています。
CHEST
+-VisionSensor LeftCamera
+-VisionSensor RightCamera
また、視覚センサの座標系は図6.の通りです。赤い軸がX軸、緑の軸がY軸、青の軸がZ軸を表します。視線方向は、Z軸のマイナス方向です。位置姿勢の具体的な数値については、sample.wrlを参照してください。
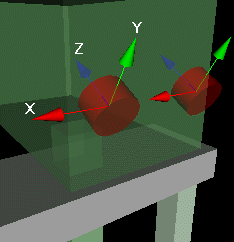
視覚センサの座標系