AGX Vehicle Continuous Track¶
AGXVehicleContinuousTrack is a continuous track model using AGX Dynamics. agxVehicle modulus is used for implementation.

About AGXVehicleContinuousTrack¶
Automatic tie of track belt
When simulation run, track belt is automatically tied around wheel. User does not need to provide geometric information, but just need to set wheel and some parameters.
Hard to come off a track belt from wheel
To avoid departing a belt from wheel, wheel and belt is merged (constrained) internally.
Optimization for better performance
Track belt is presented by connecting plate nodes by hinges. Contacting points are created when track belt contact a floor as each node is rigid body. Using these contacting points, AGX Dynamics calculate the reaction force for track belt not to penetrate in a floor. More contact points causes the heavy load of calculation and may result into worse simulation performance. AGXVehicleContinuousTrack provides the function of temporary merge of some nodes to reduce contact points.
Sample¶
Below is the explanation how to use AGXVehicleContinuous Track by using samples. Please find sample projects in below directories.
the scene of tank and Labo : chorenoid/Share/project/TankJoystickAGX.cnoid
the simple scene of tank and floor : chorenoid/Share/project/TankJoystickAGX_Floor.cnoid
User can find models using in sample projectsin below directly.
chorenoid/Share/project/tank_agx.body
How to write¶
Link composition of sample model is as below.
links:
-
name: CHASSIS
-
name: TURRET_Y
-
name: TURRET_P
-
name: TRACK_L # left track (with guides on inner and outer side of track)
-
name: WHEEL_L0 # left front wheel (with motor)
-
name: WHEEL_L1 # left center wheel (free rotation)
-
name: WHEEL_L2 # left rear wheel (free rotation)
-
name: TRACK_R # right track (with guides on inner and outer side of track)
-
name: WHEEL_R0 # right front wheel (with motor)
-
name: WHEEL_R1 # right center wheel (free rotation)
-
name: WHEEL_R2 # right rear wheel (free rotation)
-
name: TRACK_L
parent: CHASSIS
translation: [ 0, 0.16, -0.026 ]
jointType: fixed
centerOfMass: [ 0, 0, 0 ]
mass: 1.0
inertia: [
0.02, 0, 0,
0, 0.02, 0,
0, 0, 0.02 ]
elements:
-
type: AGXVehicleContinuousTrackDevice
name: TRACK_L
sprocketNames: [ WHEEL_L0 ]
rollerNames: [ WHEEL_L1 ]
idlerNames: [ WHEEL_L2 ]
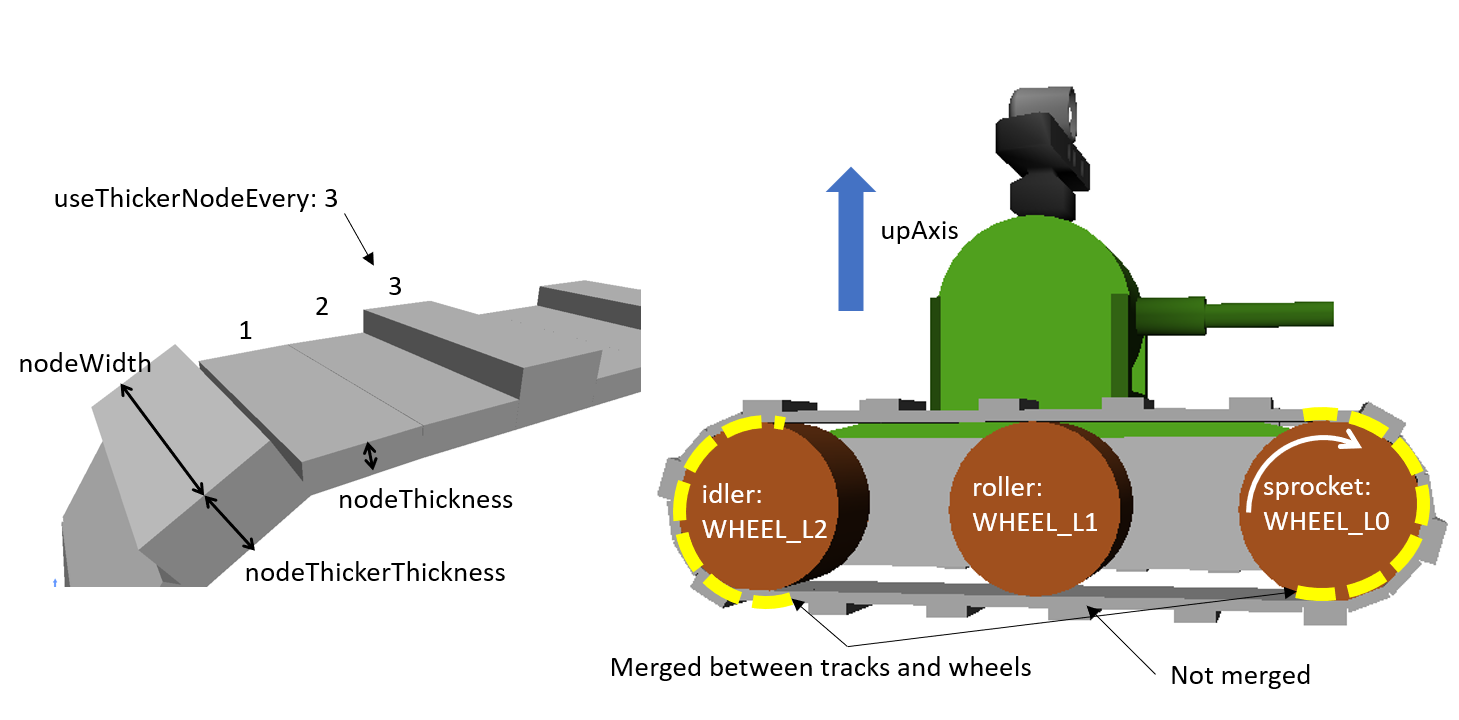
upAxis: [ 0, 0, 1 ]
numberOfNodes: 42
nodeThickness: 0.01
nodeWidth: 0.09
nodeThickerThickness: 0.02
useThickerNodeEvery: 3
material: TankTracks
nodeDistanceTension: 2.0e-4
stabilizingHingeFrictionParameter: 1e-6
minStabilizingHingeNormalForce: 100
hingeCompliance: 9.0e-10
hingeSpookDamping: 0.01
nodesToWheelsMergeThreshold: -0.01
nodesToWheelsSplitThreshold: -0.009
#enableMerge: false
#numNodesPerMergeSegment: 3
#contactReduction: 3
#enableLockToReachMergeCondition: true
#lockToReachMergeConditionCompliance: 0.1
#lockToReachMergeConditionSpookDamping: 0.01
#maxAngleMergeCondition: 1.0e-5
-
# abbr
AGXVehicleContinuousTrack is added on link elements as AGXVehicleContinuousTrackDevice. AGXVehicleContinuousTrackDevice can be added on arbitrary link.
Set driving wheel as sprocketNames
Set constrained wheel with a track belt as idlerNames.
Set non-constrained wheel as rollerNames, if necessary.
Set vertical unit vector against the moving direction of the track as upAxis.
Set number of nodes(numNodes), width(nodeWidth), and thickness(nodeThickness) of a track belt.
Set thicker thickness of node(nodeThickerThickness) and set every how many nodes it is allocated, if necessary.
Set material. Please refer Setting for track material .
Set parameters of track belt tie referring to Stabilization of track belt .
Parameter Descriptions¶
Required¶
parameter |
default value |
unit |
data type |
explanation |
|---|---|---|---|---|
type: AGXVehicleContinuousTrackDevice |
- |
- |
string |
declaration of using AGXVehicleContinuousTrack |
sprocketNames |
- |
- |
string list |
driving wheel. Belt and wheel are merged and they are not uncoupled. |
rollerNames |
- |
- |
string list |
Guide wheel that does not have constraint. It they are some wheels on the model they need to be wrote as [ WHEEL_L1, WHEEL_L3, WHEEL_L4 ]. |
idlerNames |
- |
- |
string list |
Wheel with constraint. Belt and wheel are merged and they are not uncoupled. If there are some wheels they need to be wrote as [ WHEEL_L2, WHEEL_L7, WHEEL_L8 ]. |
upAxis |
[ 0, 0, 1] |
Unit Vector |
Vec3d |
upward vector of model (against moving direction of the track) |
numberOfNodes |
50 |
piece |
unsigned int |
number of nodes |
nodeThickness |
0.075 |
m |
double |
thickness of node |
nodeWidth |
0.6 |
m |
double |
width of node (normally equal to the height of wheel) |
nodeThickerThickness |
0.09 |
m |
double |
thickness of thicker node |
useThickerNodeEvery |
0 |
every ** piece(s) |
unsigned int |
how to deploy thicker node by every * nodes. if not not use, set zero. |
material |
- |
- |
string |
material of track belt |
Almost Required¶
parameter |
default value |
unit |
data type |
explanation |
|---|---|---|---|---|
nodeDistanceTension |
5.0e-3 |
m |
double |
distance of initial node, which is parameter to adjust the tention between nodes |
stabilizingHingeFrictionParameter |
1e-6 |
- |
double |
internal friction coefficient. larger it set, harder to rotate the hinge. |
minStabilizingHingeNormalForce |
100.0 |
N |
double |
minimum normal force to calculate internal friction of hinge to connect nodes, which helps to stabilize the motion.
Setting larger value for tention between hinges will prevent track belt high and sympathetic vibration by internal friction.
It may happen that the normal force is too small or even negative value, please use minimum value in such case.
|
hingeCompliance |
1.0e-10 |
rad/Nm |
double |
compliance of hinge that connects nodes |
hingeSpookDamping |
0.0333 |
s |
double |
spookdamping of hinge that connects nodes |
nodesToWheelsMergeThreshold |
-0.1 |
- |
double |
threshold to merge the node with wheel |
nodesToWheelsSplitThreshold |
-0.05 |
- |
double |
threshold to unmerge the node from wheel |
Merging multiple nodes (that helps to improve the performance)¶
parameter |
default value |
unit |
data type |
explanation |
|---|---|---|---|---|
enableMerge |
false |
- |
bool |
on/off for node merge function |
numNodesPerMergeSegment |
0 |
- |
unsigned int |
number of nodes to be merged |
contactReduction |
3 |
- |
0 - 3 |
the level of contact reduction from zero(no reduction) to 3(maximum level) |
enableLockToReachMergeCondition |
false |
- |
bool |
to lock hinge for node to be merged |
lockToReachMergeConditionCompliance |
1.0e-11 |
- |
double |
compliance when hinge is locked |
lockToReachMergeConditionSpookDamping |
0.001 |
s |
double |
damping when hinge is locked |
maxAngleMergeCondition |
1.0e-5 |
rad |
double |
threshold angle to judge whether node is merged or not. In case threshold angle is larger than hinge angle, node is merged. |
Hints to set parameters¶
Setting for track material¶
materials:
-
name: Ground
roughness: 0.5
viscosity: 0.0
-
name: TankTracks # material of track belt
youngsModulus: 1e10
roughness: 1.0
viscosity: 0.3
-
name: TankWheel # material of wheel
youngsModulus: 1e10
roughness: 0.0
viscosity: 0.0
contactMaterials:
-
materials: [ Ground, TankTracks] # contact material between ground and track belt
youngsModulus: 1e10
friction: 0.7
secondaryfriction: 0.5
restitution: 0.0
surfaceViscosity: 1e-7
secondarySurfaceViscosity: 1e-5
primaryDirection: [ 1, 0, 0 ]
frictionModel: [ orientedBox, direct ]
referenceBodyName: Tank
referenceLinkName: CHASSIS
-
materials: [ TankWheel, TankTracks ] # contact material between wheel and track belt
youngsModulus: 1e10
friction: 0.0
restitution: 0.0
Define the material of track belt and wheel in material file
Set youngModulus(Young’s modulus), roughness(roughness), and viscosity(viscosity) for the materials of track belt and wheel. The parameters here are to be used when ContactMaterial is not set.
youngModulus needs to be set larger not to cause the penetration of track belt into wheel as the force of winding around is very large.
Set certain roughness and viscosity of track belt.
Wheel basically contact only track belt. To stabilize the simulation set zero for roughness and viscosity.
Track belt, sprocket, and idler wheel are constrained and won’t slip even roughness is set to zero.
ContactMaterial between ground and track belt should be set in material file as it should contact in the simulation.
youngsModulus needs to be set larger.
friction and secondaryFriction are set as per material.
Set surfaceViscosity and secondarySurfaceViscosity for track belt not to slip.
Set primaryDirection as moving direction.
Set frictionModel: [ orientedBox, direct ] as friction model.
Set body name to attach to track belt in referenceBodyName.
Set link name of body attached to track belt in referenceLinkName. It is set for main chassis or link with large mass.
Define ContactMaterial of wheel and track belt.
youngsModulus needs to be set larger.
Set zero for friction(friction coefficient) and restitution(restitution).
Lastly set material to the link of body file.
Set track belt material to the material of AGXVehicleContinuousTrackDevice.
Set wheel material to link wheel.
Note
Note
Material set the friction model as the orientedBox cannot be used in other model. Because orientedBox has referenceBodyName and referenceLinkName as parameter, then if set this material to other model, it can’t find referenceBody and referenceLink, thus the function is not activated.
Stabilization of track belt¶
Fix the time step of simulation. Because some parameters like compliance or damping are to be flactuated according to length of time step. Please see below.
dt = 0.005 (200Hz)
Set OFF of node merge function, which reduce the parameters to be tuned.
enableMerge: false enableLockToReachMergeCondition: false
As the result the parameters to be considered are as below. Firstly comment out of allof the setting below and check the motion of the track. (the below parameters are default value.)
#nodeDistanceTension: 5.03-3 #stabilizingHingeFrictionParameter: 1.5 #minStabilizingHingeNormalForce: 100 #hingeCompliance: 1.03-10 #hingeSpookDamping: 0.0333 #nodesToWheelsMergeThreshold: -0.1 #nodesToWheelsSplitThreshold: -0.05
Track belt moves hard and looks like hard wire. Then reduce the friction coefficient because the rfiction of hige is too large.
nodeDistanceTension: 0.0 # Set zero to the distance of initial node(then tention is zero), which helps to tune easier. stabilizingHingeFrictionParameter: 1e-6 # Set friction coefficient small. If less than 1e-1, tune by index, and set as the track does not look like hard wire.
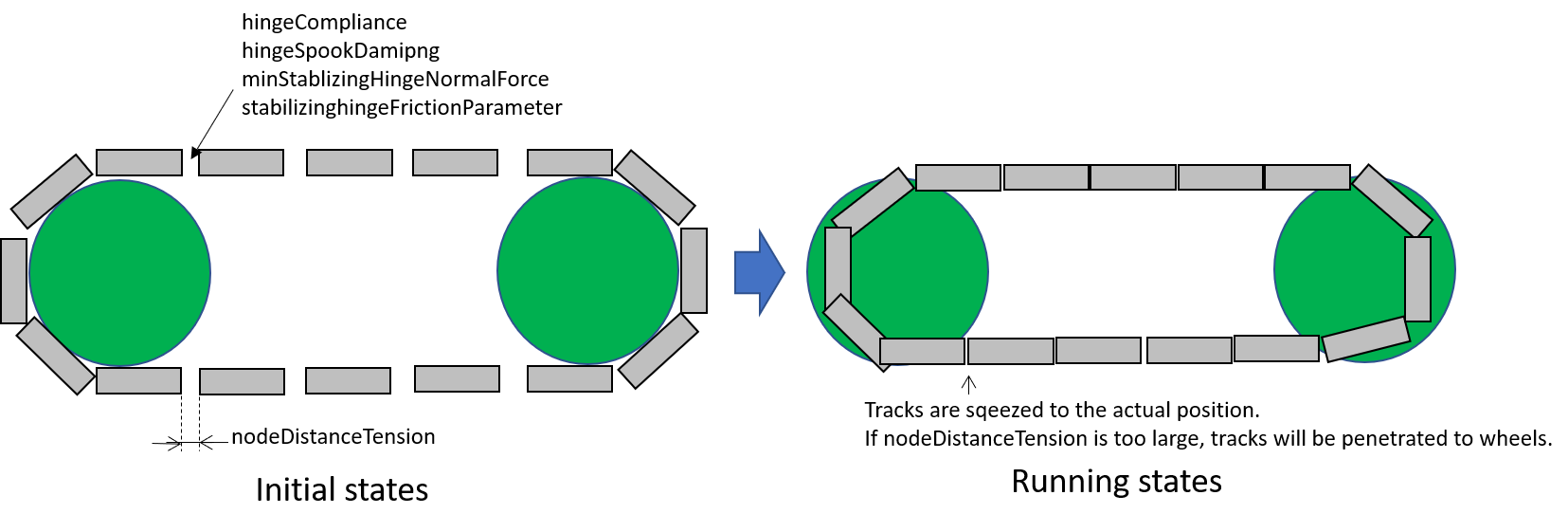
Track belt seems to have a bit loose if set above. To tighten flexure, tune the tension. Tension can be set by setting distance of initial node (nodeDistanceTension). If the value of nodeDistanceTension is large, the tention will be large as hinge tries to connect nodes by stronger force. If tension is too large the belt is goint to penetrate into wheel. (see below picture) The belt starts to vibrate because of too strong tention. Then set nodeDistanceTension smaller not to vibrate. In case the value is 5.0E-4, the belt penetrates into wheel, and in case 5.0E-5 the track belt looks loose. Tune as below.
nodeDistanceTension: 2.0e-4
Throughout above processes the track could move smooth back and forth. However the vibration may happen if user tries to pivot turn or spin turn, the track belt may start to vibrate. Compliance and damping of the hinge needs to be tune to avoid the vibration. Tune comliance by index, then find the value not to vibrate. In below case, vibration happens when 1.0e-10, then not when 1.0e-9.
hingeCompliance: 9.0e-10 hingeSpookDamping: 0.01
If the track belts get crossed or the belt penetrates into wheel when moving, set smaller value for minStabilizingHingeNormalForce. If vibrate or not stable, set the larger value.
minStabilizingHingeNormalForce: 100
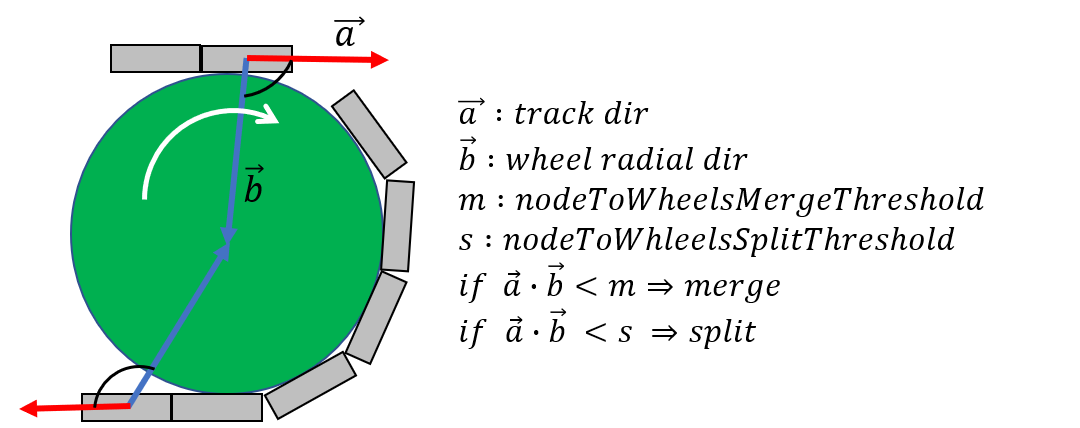
Lastly set below. It the belt set wrongly on the wheel, tune nodesToWheelsMergeThreshold and nodesToWheelsSplitThreshold. These threshold values decide the timing of merge and unmerge between track belt and wheel, which is inner product between track belt moving direction and the direction to center of wheel (see below). If this value is nearly zero, they are merged or unmerged when the two vectors cross vertically. In an actual track mechanism, the wheel has a gear that drives the belt. This value can be caluculated as the angle to pull the belt out from the wheel or the angle that the belt departs from the gear.
nodesToWheelsMergeThreshold: -0.1 # Merge when the angle of two vetor is larger than 1.67rad(95.7deg) nodesToWheelsSplitThreshold: -0.05 # Unmerge when the angle of two vector is larger than 1.62rad(92.7deg)
Performance Tuning¶
If the performance of simulation is not good or not stable, please see below setting.
Simplify the model¶
Improving the speed of simulation
Reduce the number of nodes
Reduce of number of robot link
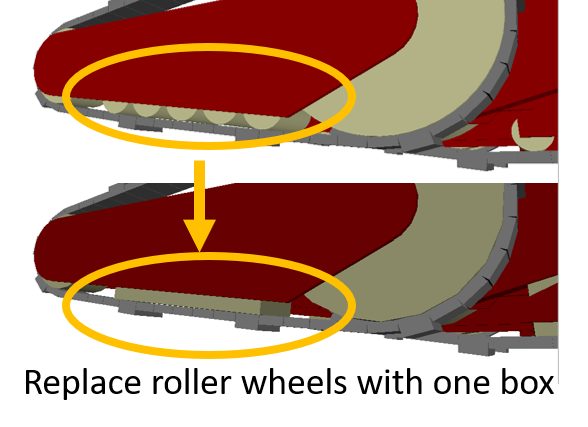
Not to use roller wheel if you use some roller wheels in the simulation
Replace to boxes (primitives) (see below)
Set the friction and restitution zero
Remove hinge joint between chassis and wheel and change to “fixed”.
Inprove the stability
Make thicker thickness of node
If the node thickness is not thick enough, it becomes easy to penetrate into the ground, and cause instability for contact responces.
Merging nodes¶
Merging nodes are merge multiple nodes as one node and reduces the amount of computation. Follow the setup steps below.
Enable node merging function
enableMerge: false
Next, specify the number of nodes to be merged. It is recommended to increase from 3 or more. Also, it is a good idea to find the number of nodes not wrapped around the wheel and specify the number of nodes to be grouped together.
numNodesPerMergeSegment: 3
Next, set the threshold to determine the timing to merge nodes. This threshold is the angle of the hinge joint connecting the nodes. Merge nodes if angle is less than threshold. This value varies greatly depending on the scale of the robot.
maxAngleMergeCondition: 1.0e-5
Specify the contact point reduction level. Sets how much to leave the contact point after merging nodes. If it is 0, nothing to change the number of contact points before merging, so we recommend specifying about 2.
contactReduction: 2
In addition, to make it easier to merge nodes, enable the function to lock hinges connecting nodes.
enableLockToReachMergeCondition: true
Finally, set the compliance and damper of the locked hinges. This value also varies greatly depending on the scale of the robot. Also, if you make it too hard, be careful as it will not be able to deform the belt along the step.
lockToReachMergeConditionCompliance: 1.0e-11 lockToReachMergeConditionSpookDamping: 0.001
Specification¶
The tracks are automatically generated when the simulation started. The tracks are not visualized when the body file loaded into Choreonoid.
AGXVehicleContinuousTrack is automatically set self collision settings as below table
This is because the track belt and the wheel must be collide
Setting collision off between the tracks and the robot that has the tracks for performance
Wheels
Track belt
Wheels
-
Collision on
Other links of the robot
Depend on user settings
Collision off