サンプルプロジェクトを開く¶
コレオノイドには、ロボットの動作パターンの設計をすぐに体験できるように、GR-001の3Dモデル、床のモデル、およびサンプルモーションが付属しています。また、これらのデータをまとめて読み込むためのプロジェクトファイル “GR001Sample.cnoid” も付属しています。このドキュメントでは、このサンプルプロジェクト GR001Sample.cnoid を使って、コレオノイドによるロボットの動作パターンの作成方法について解説していきます。
まず、コレオノイドでサンプルプロジェクト “GR001Sample.cnoid” を開きます。 メニューバーの “ファイル” をクリックしプルダウンメニューを表示させて下さい。
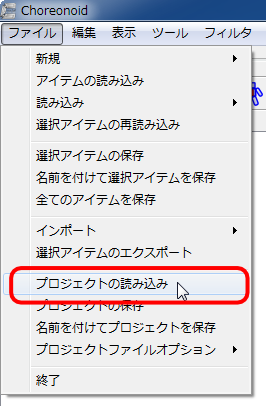
このプルダウンメニューの中から「プロジェクトの読み込み」をクリックすると 「Choreonoid プロジェクトファイルの読み込み」ダイアログが表示されます。

GR001Sample.coidは、コレオノイドのインストール先フォルダの下の “shareprojects” にあります。 (インストーラからインストールした場合、デフォルトのインストール先は “C:¥Program Files¥Choreonoid 1.1” あるいは “C:Program Files (x86)Choreonoid 1.1” といったフォルダになります。) コレオノイド をインストールした直後は、ダイアログにはインストール先の”share”フォルダが表示されているかと思いますので、そこから “projects” に入り、”GR001Sample.cnoi” というファイルを見つけてください。
GR001Sample.cnoid がみつかったら、これを選択して「読み込み」のボタンを押すか、ファイルをダブルクリックしてください。するとプロジェクトが読み込まれて、下図のようにロボット等が表示されるようになります。
