ステップ4: クローラの制御¶
ステップ3で砲塔の制御ができるようになりましたので、ステップ4では車体を動かすクローラ部分の制御をできるようにしましょう。
Tankモデルの簡易クローラ¶
Tankモデルの左右のクローラは「簡易クローラ」としてモデリングされています(クローラの記述 参照)。これはクローラ部と環境との接触点に推力を与えるというもので、履帯の部分が実際にホイールの周りを動いていくというものではないのですが、これを用いることでクローラ風の動きをすることが可能です。ただし、履帯の部分が地形に沿って変形していくようなものではないので、走破性は本物のクローラには及びません。この詳細は 無限軌道の簡易シミュレーション を参照して下さい。
Tankモデルでは、左クローラに対応するリンクが "TRACK_L"、右クローラに対応するリンクが "TRACK_R" という名前でモデリングされています。これらのリンクは簡易クローラに対応する "pseudoContinuousTrack" タイプの軸が設定されており、それらの軸をゲームパッドで制御できるようにしたいと思います。
簡易クローラのコントローラ¶
今回作成するコントローラ "TrackController" のソースコードを以下に示します。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 | #include <cnoid/SimpleController>
#include <cnoid/Joystick>
using namespace cnoid;
class TrackController : public SimpleController
{
Link* trackL;
Link* trackR;
Joystick joystick;
public:
virtual bool initialize(SimpleControllerIO* io) override
{
trackL = io->body()->link("TRACK_L");
trackR = io->body()->link("TRACK_R");
trackL->setActuationMode(Link::JOINT_SURFACE_VELOCITY);
trackR->setActuationMode(Link::JOINT_SURFACE_VELOCITY);
io->enableOutput(trackL);
io->enableOutput(trackR);
return true;
}
virtual bool control() override
{
static const int axisID[] = { 0, 1 };
joystick.readCurrentState();
double pos[2];
for(int i=0; i < 2; ++i){
pos[i] = joystick.getPosition(axisID[i]);
if(fabs(pos[i]) < 0.2){
pos[i] = 0.0;
}
}
trackL->dq() = -2.0 * pos[1] + pos[0];
trackR->dq() = -2.0 * pos[1] - pos[0];
return true;
}
};
CNOID_IMPLEMENT_SIMPLE_CONTROLLER_FACTORY(TrackController)
|
これまでと同様に、上記のソースコードを "TrackController.cpp" というファイル名でプロジェクトディレクトリに保存し、同ディレクトリ内のCMakeLists.txtに
add_cnoid_simple_controller(TankTutorial_TrackController TrackController.cpp)
という記述を追加し、コンパイルを行って下さい。
コントローラの導入¶
コントローラの導入についても、これまでと同様に…と言いたいところですが、今回作成したコントローラは砲塔を制御する部分がありませんので、このコントローラだけセットしても、砲塔を動かすことができなくなってしまいます。そこで、これまでの砲塔のコントローラを生かしつつ、今回のコントローラを追加で導入したいと思います。
注釈
もちろん、今回のソースコード自体に砲塔制御のコードも含めておくという手もあります。その場合はこれまでと同様に、シンプルコントローラアイテムの「コントローラモジュール」に、統合したコントローラのファイルを指定すればOKです。本チュートリアルではステップごとに追加される部分を明確にするため、各ステップのコントローラにはあえて追加部分のみを記述しています。また、そのようにコントローラを機能ごとに分けておくことは、開発したコントローラの再利用性を向上させることにもつながります。
コントローラを追加するには、シンプルコントローラアイテムを追加すればOKです。ステップ2で行った コントローラアイテムの生成 と同様の操作でアイテムを生成して下さい。生成するアイテムの名前はコントローラの名前と合わせて、"TrackController" とするとよいでしょう。生成したアイテムの「コントローラモジュール」プロパティには、今回作成したコントローラファイル "TankTutorial_TankController.so" を指定します。
ここで注意が必要なのが、追加したコントローラアイテムの配置です。まず、ひとつ目のコントローラアイテムと同様に、以下のように配置することが考えられます。
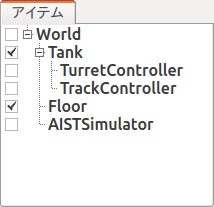
このように制御対象モデルの小アイテムとして複数のコントローラアイテムを並列に配置した場合、それらは独立したコントローラとしてモデルの制御を行います。具体的には以下の動作となります。
- 各コントローラに渡される SimpleControllerIO型のオブジェクト(IOオブジェクト)はそれぞれ異なるオブジェクトとなる。IOオブジェクトから取得する入出力用Bodyオブジェクトについても異なるものとなる。
- 各コントローラのcontrol関数は並列に実行される。正確には、シミュレータアイテムの「コントローラスレッド」プロパティがtrueとなっている場合、各コントローラのcontrol関数用に別スレッドが割り当てられて、それらが並列実行される。
一方で、今回の2つのコントローラアイテムは以下のように配置することも可能です。
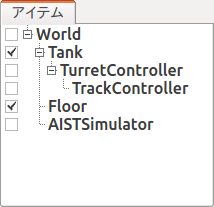
ここでは2つ目のコントローラを1つめのコントローラの小アイテムとして配置しています。この場合、2つのコントローラが一体となって動作します。具体的には以下の動作となります。
- 各コントローラに渡されるIOオブジェクトは、同一オブジェクトの共有となる。従って、IOオブジェクトから得られる入出力用Bodyオブジェクトも共有となる。
- 各コントローラのcontrol関数は直列に実行される。実行順序はツリー内での深さ優先探索順となる。
本チュートリアルで作成するコントローラはどちらの場合でも正常に動作しますが、一般的には後者の一体形式を用いるのが望ましいです。そちらの方が必要なリソースが少なくて済みますし、コントローラ間の連携もしやすくなるからです。本チュートリアルではこの一体形式を用いるものとしますので、本ステップでは2番目の図のようにTurnetControllerの小アイテムとしてTrackControllerを配置するようにしてください。
なお、前者の並列形式についても、複数のコントローラの並列実行が可能という点は利点となります。また、異なるタイプのコントローラアイテムは、この形式でしか利用できません。従って、状況に応じて両形式を使い分けることになります。
クローラの操作¶
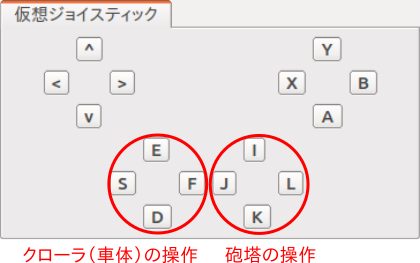
シミュレーションを実行しましょう。今回はゲームパッドのもう一方(左側)のアナログスティックで、Tankモデルの車体を走らせることができますので、試してみて下さい。スティックを前に倒すと前進、後ろで後退、左で左旋回、右で右旋回となります。
また、TurretControllerも残してありますので、砲塔の制御も引き続き可能となっています。
ゲームパッドの各部位と操作内容の対応を仮想ジョイスティックビューで示すと以下のようになります。
これでTankモデルの全ての軸を操作できるようになりました。
実装内容の解説¶
TrackControllerの実装内容について、このコントローラに特有の部分に絞って解説します。
まずintialize関数内の
trackL = io->body()->link("TRACK_L");
trackR = io->body()->link("TRACK_R");
によって、左右それぞれのクローラに対応する入出力用リンクを取得しています。次に
trackL->setActuationMode(Link::JOINT_SURFACE_VELOCITY);
trackR->setActuationMode(Link::JOINT_SURFACE_VELOCITY);
によって、各クローラリンクの アクチュエーションモード として JOINT_SURFACE_VELOCITY を指定しています。 Tankモデルについては クローラの記述 で示したように、モデルファイルにおいてアクチュエーションモードの指定をしていますので、この記述は無くても結構です。ただし、モデルファイルでそのように指定されているとは限りませんので、このようにアクチュエーションモードを明示的に設定するのが望ましいかと思います。
そして、
io->enableOutput(trackL);
io->enableOutput(trackR);
によって各クローラリンクへの出力を有効にしています。
アクチュエーションモードが JOINT_SURFACE_VELOCITY の場合、出力する指令値はトルクではなく、クローラの表面速度で与えるようになっています。また、入力については特に必要ありません。従って、ここでは出力のみを有効化する "enableOutput" 関数を用いています。JOINT_SURFACE_VELOCITYの場合、リンクの状態変数 dq を用いて表面速度を出力します。
control関数内の
static const int axisID[] = { 0, 1 };
は、クローラ軸に対応させるゲームパッドの軸IDの設定です。これについても、 ゲームパッドの準備 で述べたもの以外のゲームパッドを用いる場合は、適切な対応となるよう値を修正する必要があるかもしれません。
出力は関節速度を格納する変数dqにセットします。control関数内の
trackL->dq() = -2.0 * pos[1] + pos[0];
trackR->dq() = -2.0 * pos[1] - pos[0];
によって、軸の状態から各クローラの駆動速度を決定し出力しています。スティックの前後軸については両クローラに対して同じ駆動速度を与え、スティックの左右軸については両クローラに正反対の駆動速度を与えます。このようにすると、前後軸で前進後退、左右軸で旋回という挙動になります。