振り付け機能の応用例¶
「ロボット動作振り付けソフトウェア」としてのコレオノイドは、 産総研知能システム研究部門ヒューマノイド研究グループにて、 二足歩行ヒューマノイドロボットの産業応用を模索する中で開発されてきたソフトウェアです。 当グループにおいては、生活支援や極限環境作業といったヒューマノイドロボットの応用に加えて、ヒューマノイドロボットのコンテンツ産業への応用も視野に入れて研究開発を行っています。 この取り組みの一環として、人に極めて近い外観を有する等身大二足歩行ヒューマノイドロボットである「サイバネティックヒューマンHRP-4C未夢」を開発しました。 そして、このロボットの表現能力を引き出し、このロボットを用いた魅力的なコンテンツの作成を支援することが、コレオノイド開発の重要なミッションとなっています。 (詳しくは、 「ヒューマノイドロボットのコンテンツ技術化に向けて」 をご覧ください。)
ここでは、当グループが制作・公開に関わったロボットコンテンツ(デモンストレーション)の中から、コレオノイドを用いて作成されたものをいくつか紹介します。
DC-EXPO2010:「ダンスロボットプロジェクト」¶
デジタルコンテンツEXPO2010「ダンスロボットプロジェクト」において、ダンスクリエイターSAM氏の振り付けによるHRP-4C未夢のダンスコンテンツの発表を行い、2010年10月16日〜17日に計5回の公演を行いました。 ステージの中央で歌って踊っているのがHRP-4C未夢で、SAM氏の振り付けをもとに、ロボットの動作データは全てコレオノイドを用いて作成しました。(キーフレーム入力等はコレオノイドの開発者が行いました。)
本ダンスで使われている楽曲はEvery Little Thingの「出逢った頃のように」です。 ロボットの歌声は、ヤマハ株式会社の歌声合成システムVOCALOIDによる合成音声です。 歌声の表現力を高めるため、産総研の中野・後藤が開発した「VocaListener(ぼかりす)」技術を用いて、 合成音声を原曲の持田香織氏の歌い方に近づけています。
協力:
プロデュース:石川勝(東京大学IRT研究機構特別研究員)
ダンス振り付け:SAM(ダンスクリエイター/ダンサー)
バックダンサー: MIKI, CHIHOMI, SACHI, RISA(未夢フレンズ )
楽曲:Every Little Thing 「出逢った頃のように」(エイベックストラックス)
合成音声:CV-4Cβ(クリプトン・フューチャー・メディア株式会社)
音声データ/リップシンクデータ制作:ヤマハ株式会社
衣装:二瓶句実子
関連記事:
ASCII.jp: 歌って踊れるようになった女性型ロボット「HRP-4C」 (関連動画 "HRP-4C Dance 1/2")
ITmediaニュース: 「すごい……」 美少女ロボ「未夢」のダンスに驚嘆
IPod Style: デジタルコンテンツEXPO 2010 レポート
DC-EXPO2009: 「アクターデモンストレーション」¶
上で紹介したDC-EXPO2010の1年前に行われた DC-EXPO 2009 では、HRP-4Cが芝居を行うコンテンツの制作にトライしました。 将来HRP-4Cのようなロボットが身近に使われるようになったときに、人々がロボットに対してどのような反応を見せるかを、「ロボットが記録しているログの再生」というかたちで表現した、ひとり芝居となっています。 脚本はプロの演出家の方が作成したもので、芝居の振り付けについてはこの時からSAM氏に担当してもらいました。 この詳細やデモンストレーション動画については、以下に示すRobot Watchの記事をご覧ください。
このときはまだコレオノイドが開発中であり、脚も含む動作の作成に関する機能が十分ではなかったため、上半身のみのパフォーマンスとなりました。しかし、この取り組みを通してコレオノイドの振り付け機能の基本を確立することができ、上半身のみとは言え、表情豊かな動作表現を行うことができました。
振り付けをSAM氏にお願いしたのは、これ以降のダンスコンテンツの実現を見据えてのことでした。 このような経緯もあり、本イベントでロボットコンテンツに関するトークセッションを行う中で、「1年後にHRP-4Cによるダンスコンテンツを実現する」という宣言を行いました。これが結果として上述のダンスコンテンツとして実を結んだことになります。
関連記事:
Robot Watch: 1年後には「HRP-4C」が歌って踊る、「ダンスロボットプロジェクト」始動へ
Robot Watch: HRP-4Cやパペじろうが活躍する「DIGITAL CONTENT EXPO 2009」開幕
HRP-4 プレスリリース¶
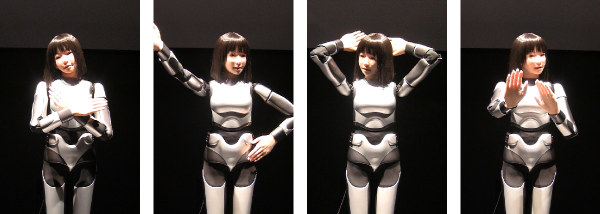
HRP-4C以外のロボットへの応用例として、HRP-4Cの兄弟機とも言える"HRP-4"のデモンストレーションを紹介します。 上の動画は、2010年9月に川田工業株式会社と産総研が共同でHRP-4のプレスリリースを行った際のデモンストレーションとなっており、この中で使われているいくつかの動作はコレオノイドを用いて作成しました。体操の動作や、手を後ろに回してポーズをとる動作が該当します。
HRP-4Cでは「人らしい」動作の作成を意識することが重要ですが、HRP-4はロボットらしい外観を持つロボットなので、ロボットらしい動作を行っても違和感がありません。コレオノイドを用いて実際に動作を作成したところ、少ないキーフレームから違和感の無い動作が作ることができ、非常に簡単に短時間で動作を作成することが出来ました。一方で、HRP-4Cのようなリアルなロボットで違和感の少ない動作を作成するためには、まだ多くの労力を要するところもあり、これを解決していくことが今後のコレオノイド開発の課題のひとつと言えそうです。
関連記事:
産総研プレスリリース: 働く人間型ロボット研究開発用プラットフォームHRP-4を開発
PC Watch: 森山和道の「ヒトと機械の境界面」 川田工業と産総研、重量39kgのヒューマノイド・ロボット「HRP-4」を発表